



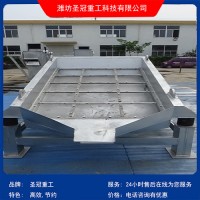
 振動篩廠家
振動篩廠家
 噸袋包裝機
噸袋包裝機
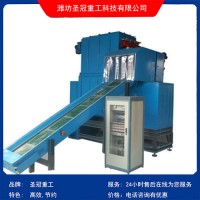 噸袋包裝機廠家
噸袋包裝機廠家
 噸袋包裝機價格
噸袋包裝機價格
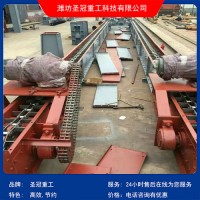 刮板機
刮板機









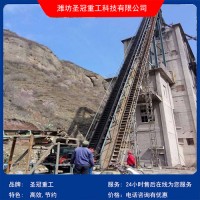
對于長距離、大運量、布置復(fù)雜的帶式輸送機,我公司將進行帶式輸送機的動態(tài)分析,將輸送帶按粘彈性體的力學(xué)性質(zhì),綜合計人驅(qū)動裝置的起制動特性、各運動體的質(zhì)量分布、線路各區(qū)段的坡度變化、各種運動阻力、輸送帶的初始張力、輸送帶的撓度變化、拉緊裝置的形式和位置及張緊力等因素的作用,建立輸送機動力學(xué)數(shù)學(xué)模型,求得輸送機在起動和制動過程中,輸送帶上的不同點隨時間的推移所發(fā)生的速度、加速度和張力的變化。預(yù)報按傳統(tǒng)的靜態(tài)設(shè)計方法設(shè)計的輸送機可能出現(xiàn)的動態(tài)危險和不安全之處,對該設(shè)計提出改進和調(diào)整措施,確定優(yōu)化的設(shè)計和控制參數(shù)。
多種驅(qū)動方案選擇:對于長距離、線路復(fù)雜的帶式輸送機,常規(guī)驅(qū)動配置方案已不能滿足啟動、運行要求,最好采用具有可控起制動功能的驅(qū)動裝置,控制輸送機按理想的起、制動速度曲線起動和制動,以減小輸送帶及承載部件的動態(tài)載荷。主要有:固態(tài)降壓軟啟動方式、交流變頻調(diào)速驅(qū)動方式、CST可控起制動方式、繞線電機轉(zhuǎn)子回路串接電阻的軟起動方式、液體粘性軟啟動方式、液壓馬達驅(qū)動方式、調(diào)速液力耦合器驅(qū)動方式等。